


NT-Pulse
NT-Pulse
Long-Range, Ultra High Resolution Software Defined Imaging Radar
NT-Pulse
NT-Pulse enables next-generation radar sensing systems by providing a breakthrough combination of resolution, range, point density, size, cost and software flexibility.
NT-Pulse delivers highly dense 4D point clouds with excellent performance in a compact size for radar-based perception, classification, mapping, tracking, and autonomous navigation. Its rugged solid-state architecture allows reliable operation in rain, fog, dust, snow, and other harsh environments.
Highlights
Industry leading resolution without compromise to doppler or range performance
1.5° static angular resolution with 2nd-gen advanced beamformer
Zadar SDK supports dynamic radar reconfiguration and performance optimization
Robust against in-band interference
Optional automotive ethernet or PoE
Mobile Applications (77GHz)
Next-gen ADAS
Fully autonomous driving
Mining and construction
Industrial and agricultural
Configuration Options:
| Power & Interface | Long range antenna 120° × 24° FOV 800-meter car detection | Wide FOV antenna 120° × 50° FOV 350-meter car detection | Ultra-wide FOV antenna 120° × 90° FOV 250-meter car detection |
|---|---|---|---|
| 12V DC / 1000 BASE-T1 For automotive and robotics | NT-Pulse-T1-LR | NT-Pulse-T1-W | NT-Pulse-T1-U |
| Power over Ethernet/ RJ45 For infrastructure and evaluation | NT-Pulse-POE-LR | NT-Pulse-POE-W | NT-Pulse-POE-U |
NT-Pulse Radar Detection Performance:
| Antenna Configuration | Long range | Wide FOV | Ultra wide FOV |
|---|---|---|---|
| Description |
Longest detection range with highest antenna gain. Good for long-range forward looking applications and large area scanning. |
Long detection range with wide vertical field of view. Good for all-purpose applications in mobility and infrastructure. |
Good detection range with widest vertical field of view Good for close-up, high point cloud density applications in robotics |
|
Field of View1 Horizontal x Vertical |
120° × 24° | 120° × 50° | 120° × 90° |
| Static Angular Resolution2 | 1.5° | 1.5° | 1.5° |
| Angular Accuracy Horizontal x Vertical |
±0.25° | ||
| Truck Detection3 | >400 m | >400 m | >250 m |
| Car Detection4 | >400 m | >350 m | >250 m |
| Human Detection5 | >200 m | >130 m | >85 m |
| Instrumented Range Max.6 | 0.1 – 400 m | 0.1 – 400 m | 0.1 – 250 m |
| Range Resolution Min.7 | 0.033 m | ||
| Range Accuracy Min.7 | 0.01 m | ||
| Doppler Ambiguity Max.8 | 143.4 m/s (516 km/h, 320 mph) | ||
| Doppler Resolution Min.8 | 0.08 m/s | ||
| Frame Time | 40 ms / 25 Hz | ||
Foot Notes
1 Field of view is based on 6dB antenna beamwidth in azimuth and elevation
2 Angular resolution is measured
3 Truck detection range: 28 dBsm typical pickup truck RCS in obstruction-free real-world scenario, >⁹⁰%detectability
4 Car detection range: 20 dBsm typical sedan RCS in obstruction-free realworld scenario, >90% detectability
5 Pedestrian detection range: -2 dBsm
typical human RCS in obstruction-free real-world scenario, >90% detectability
6 Custom radar operational modes can be applied upon request to increase the maximum instrumented range beyond the advertised limits. See detailed radar specification for full list of operational modes
7 Range resolution and accuracy for high point cloud density optimized modes
8 Doppler ambiguity and resolution for doppler optimized modes
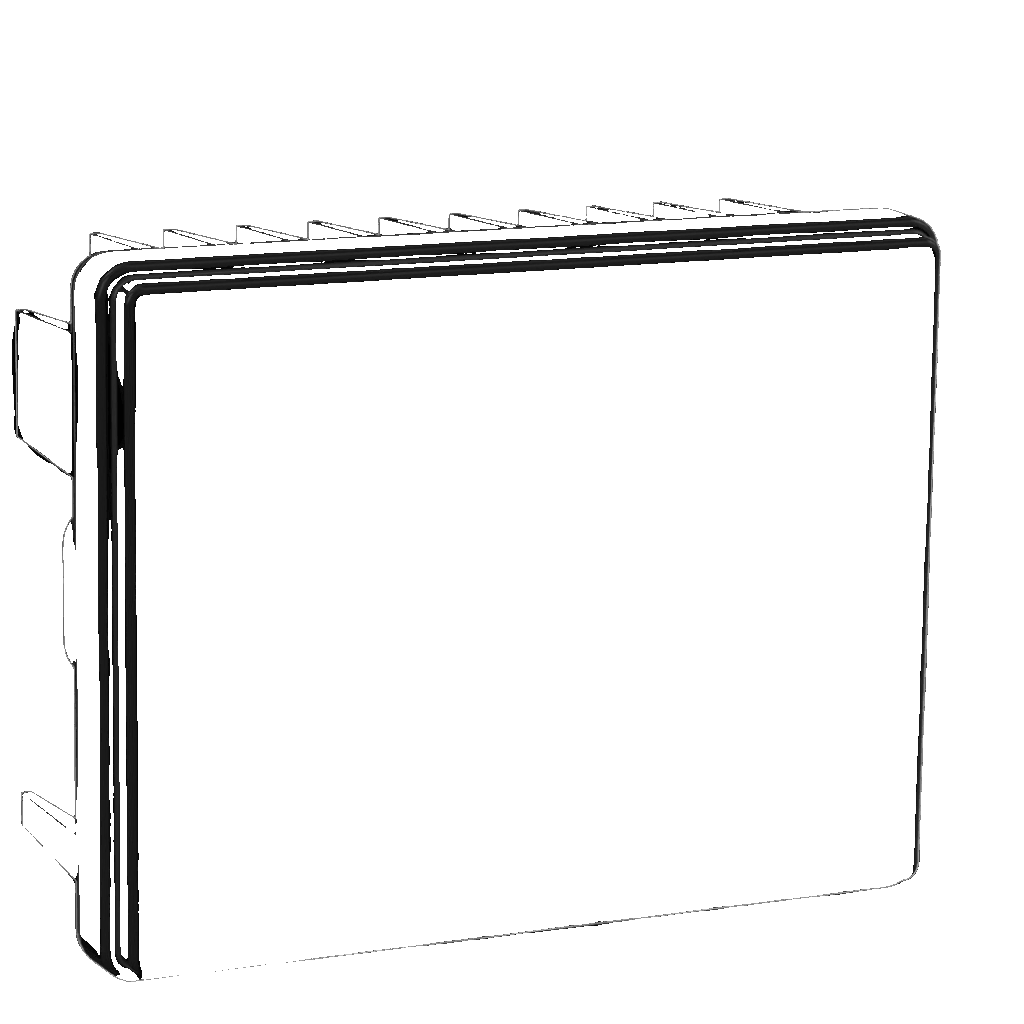
NT-Pulse Hardware Specifications
Each edition is available in three antenna types: Long Range, Wide FOV andUltra-wide FOV
| Configuration | 12V/1000BASE-T1 Edition | PoE/RJ45 Edition |
|---|---|---|
| Frequency | 77–81 GHz Worldwide | |
| Certification | FCC Part 15 pending | |
| Radio Principle | Cascaded SDIR™ with RF-FMCW modulation and 2nd gen HiRes Beamformer | |
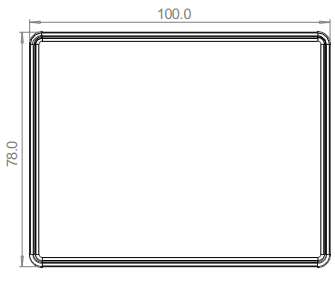
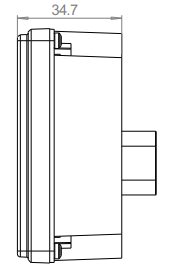
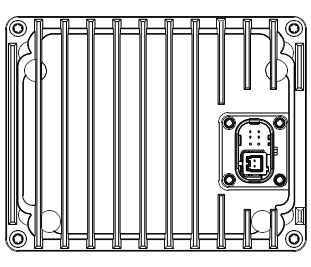
| Dimensions | 100 × 78 × 35 mm | |
| Weight (Preliminary) | 200 g (7.0 oz) | 240 g (8.5 oz) |
| Mounting (Preliminary) | Back: 4× M4 screws Top: 2× M2.5 screws, 2× locating 2mm pin holes | |
| Material | Polycarbonate + 6061-T6 Aluminum Black Anodized | |
| Operating Temperature | -40° – 85°C | |
| Storage Temperature | -40° – 95°C | |
| Weather Sealing | IP68 2-meter | IP67 |
| Lifetime | Tests Pending | |
| Shock & Vibration | IEC 60068-2-27,64 Tests Pending | |
| Interface | 1000BASE-T1 | 1000BASE-T over RJ45 |
| Connector | 6-pin JAE MX44 Automotive Header | Sealed RJ45 |
| Power Supply | +9–24 V DC, 12 V nominal | 802.3bt Type 3 (PoE++) |
| Power Consumption | 10 W average, 15 W peak | |
| Synchronization | IEEE 1588 PTP, gPTP | |
| IMU Output | 3 axis gyro, 3 axis accelerometer, 208 Hz sampling rate STMicroelectronics ASM330LHH; | |
NT-Pulse Modes For Dynamic Platforms
*The platform speed needs to be less than ¼ of the provided range for Doppler Ambiguity, otherwise the reported platform velocity might be folded.
Modes 7 and 8 are unavailable for the ultra-wide FOV
| Mode Configuration | 2 | 3 | 5 | 7 |
|---|---|---|---|---|
| Max Range | 30m | 85m | 250m | 400m |
| Minimum Range | 0.05m | 0.1m | 0.3m | 0.5m |
| Range Resolution | 3.3cm | 8.9cm | 26.2cm | 41.9cm |
| Doppler Ambiguity* | 74.4m/s | 143.4m/s | 143.4m/s | 143.4m/s |
| Doppler Resolution | 0.079m/s | 0.145m/s | 0.145m/s | 0.145m/s |
| Field of View (H × V) | 120° × 24° (LR) / 120° × 50° (W) / 120° × 90° (U) | |||
| Static Angular Resolution | 1.5deg | |||
| Angular Accuracy | ±0.25° | |||
| Frame Time | 50ms | |||